AP08857522 – Development of parallel manipulators of the RoboMech class
Objective of the project: The aim of the project is to develop parallel manipulators of the RoboMech class and their application for automation of stamping and handling operations in small machine-building enterprises.
Relevance: The project develops PMs of the RoboMech class, which have the property of manipulative robots, as the movement of output objects according to the given laws of motion, and mechanisms, as the setting of the laws of motion of drives. As noted above, setting the laws of motion of the drives (monotonically and uniformly) improves the dynamic characteristics and significantly simplifies the control system (in some cases excludes the control system), therefore, the cost of the designed PM also decreases.
Scientific adviser: Doctor of technical sciences, Professor, Baigunchekov Zhumadil Zhanabaevich
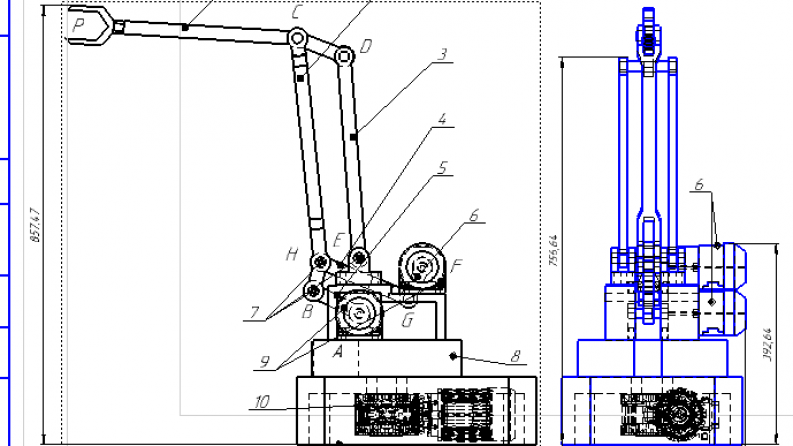
Results obtained: The research and development work focused on designing and studying three types of RoboMech-class industrial manipulators for automation of technological and handling operations. Structural and parametric synthesis was carried out for a dual-slider mechanism, a positioning manipulator with two end-effectors, and a cylindrical coordinate-based system. Kinematic and dynamic analyses were performed, including direct and inverse kinematics and derivation of motion differential equations using Lagrange’s second-order equations. Kinetostatic and strength analyses were conducted to determine joint reactions and internal forces in structural elements. 3D models, design documentation, and prototype samples were developed and manufactured. The proposed manipulators demonstrate simplified control systems and higher productivity compared to existing solutions. The results were experimentally validated and protected by patents of the Republic of Kazakhstan.
List of publications with links to them
- Baigunchekov Z., Naurushev B., Zhumasheva Z., Mustafa A., Kairov R., Amanov B. Structurally parametric synthesis and position analysis of a RoboMech class parallel manipulator with two end-effectors // IAENG International Journal of Applied Mathematics. – 2020. – Vol. 50(2). – P. 1–11. – DOI: http://www.iaeng.org/IJAM/issues_v50/issue_2/IJAM_50_2_23.pdf
- Baigunchekov Z., Laribi M.A., Kaiyrov R., Zholdassov E. Inverse kinematics and workspace of a 3-PRRS type parallel manipulator // Mechanisms and Machine Science. – 2021. – Vol. 103. – P. 71–78.
- Baigunchekov Z., Laribi M.A., Kassinov A., Mustafa A. Kinematic synthesis and analysis of the RoboMech class parallel manipulator with two grippers // Robotics. – 2021. – Vol. 10(3). – Art. 99. – DOI: https://doi.org/10.3390/robotics10030099
- Baigunchekov Z., Carbone G., Mustafa A., Amanov B., Zholdassov E. Structural-parametric synthesis of the RoboMech class parallel mechanism with two sliders // Applied Sciences. – 2021. – Vol. 11(21). – Art. 9831. – DOI: https://doi.org/10.3390/app11219831
- Baigunchekov Z., Carbone G., Zhumasheva Z., Amanov B., Zholdassov E., Tolenov S., Tleukhanov A. Kinematics of the “Ai-Gerim” robot arm // Advances in Service and Industrial Robots. – Springer, 2022. – P. 11–18. – DOI: https://doi.org/10.1007/978-3-031-04870-8_2
- Байгунчеков Ж.Ж., Мустафа А.К., Карбоне Д., Лариби М.А. Двухползуный механизм: патент РК на полезную модель №7019.