AP08857522 – Разработка параллельных манипуляторов класса RoboMech
Цель проекта: Целью проекта является разработка параллельных манипуляторов класса RoboMech и их применение для автоматизации штамповочных и погрузочно-разгрузочных операций в малых машиностроительных предприятиях.
Актуальность: В проекте разрабатываются ПМ класса RoboMech, которые обладают свойством манипуляционных роботов, как перемещение выходных объектов по заданным законам движений, и механизмов, как задание законов движений приводов. Как было отмечено выше, задание законов движений приводов (монотонно и равномерно) улучшает динамические характеристики и существенно упрощает систему управления (в некоторых случаях исключает систему управления), следовательно, снижается также себестоимость проектируемого ПМ.
Научный руководитель: Доктор технических наук, Профессор, Байгунчеков Жумадил Жанабаевич
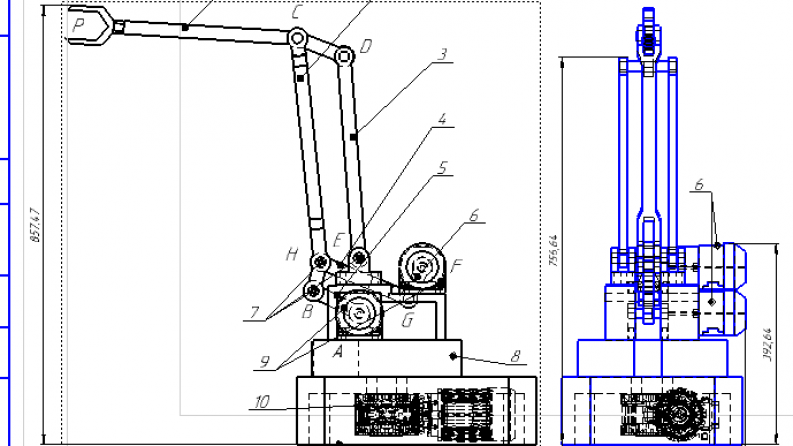
Полученные результаты: В ходе НИР разработаны и исследованы три типа промышленных манипуляционных устройств класса RoboMech для автоматизации технологических и перегрузочных операций. Выполнен структурно-параметрический синтез механизмов с двумя ползунами, позиционирующего устройства с двумя рабочими органами и системы, работающей в цилиндрической системе координат. Проведён кинематический и динамический анализ, включая решение прямых и обратных задач кинематики и составление дифференциальных уравнений движения на основе уравнений Лагранжа второго рода. Выполнен кинетостатический и прочностной анализ звеньев с определением усилий и реакций в кинематических парах. Разработаны 3D-модели, конструкторская документация и изготовлены опытные образцы предложенных устройств. Установлено, что разработанные ПМ обладают упрощённой системой управления и высокой производительностью по сравнению с аналогами. Результаты исследований подтверждены экспериментально и защищены патентами Республики Казахстан.
Список публикаций с ссылками на них
- Baigunchekov Z., Naurushev B., Zhumasheva Z., Mustafa A., Kairov R., Amanov B. Structurally parametric synthesis and position analysis of a RoboMech class parallel manipulator with two end-effectors // IAENG International Journal of Applied Mathematics. – 2020. – Vol. 50(2). – P. 1–11. – DOI: http://www.iaeng.org/IJAM/issues_v50/issue_2/IJAM_50_2_23.pdf
- Baigunchekov Z., Laribi M.A., Kaiyrov R., Zholdassov E. Inverse kinematics and workspace of a 3-PRRS type parallel manipulator // Mechanisms and Machine Science. – 2021. – Vol. 103. – P. 71–78.
- Baigunchekov Z., Laribi M.A., Kassinov A., Mustafa A. Kinematic synthesis and analysis of the RoboMech class parallel manipulator with two grippers // Robotics. – 2021. – Vol. 10(3). – Art. 99. – DOI: https://doi.org/10.3390/robotics10030099
- Baigunchekov Z., Carbone G., Mustafa A., Amanov B., Zholdassov E. Structural-parametric synthesis of the RoboMech class parallel mechanism with two sliders // Applied Sciences. – 2021. – Vol. 11(21). – Art. 9831. – DOI: https://doi.org/10.3390/app11219831
- Baigunchekov Z., Carbone G., Zhumasheva Z., Amanov B., Zholdassov E., Tolenov S., Tleukhanov A. Kinematics of the “Ai-Gerim” robot arm // Advances in Service and Industrial Robots. – Springer, 2022. – P. 11–18. – DOI: https://doi.org/10.1007/978-3-031-04870-8_2
- Байгунчеков Ж.Ж., Мустафа А.К., Карбоне Д., Лариби М.А. Двухползуный механизм: патент РК на полезную модель №7019.