AP08857522 – RoboMech класының параллельді манипуляторларын жасау
Жобаның мақсаты - RoboMech класының параллельді манипуляторларын әзірлеу және оларды шағын машина жасау кәсіпорындарында тескіш және өңдеу операцияларын автоматтандыру үшін қолдану.
Өзектілігі: Жобада берілген қозғалыс заңдары бойынша шығыс объектілердің қозғалысы ретінде, ал жетектердің қозғалыс заңдылықтарын орнату ретінде механизмдер ретінде манипуляциялық роботтардың қасиеті бар RoboMech класының ПМ әзірлейді. Жоғарыда атап өтілгендей, жетектердің қозғалыс заңдылықтарын орнату (монотонды және біркелкі) динамикалық сипаттамаларды жақсартады және басқару жүйесін айтарлықтай жеңілдетеді (кейбір жағдайларда басқару жүйесін алып тастайды), сондықтан жобаланған ПМ құны да төмендейді
Ғылыми жетекшісі: Техникалық ғылымдар докторы, Профессор, Байгунчеков Жумадил Жанабаевич
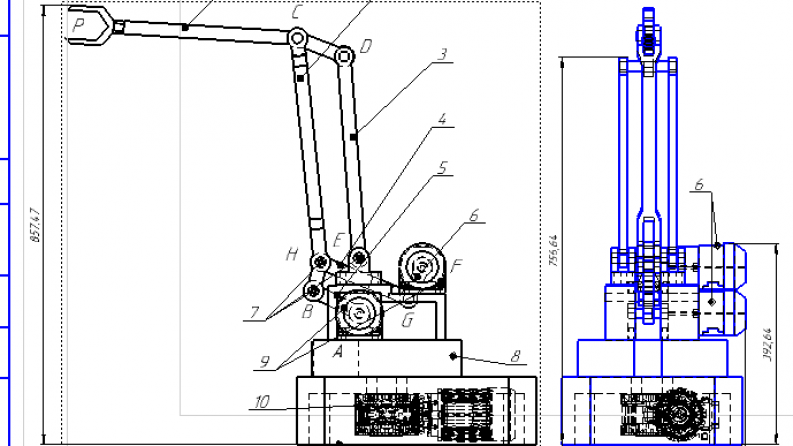
Алынған нәтижелер: Ғылыми-зерттеу жұмысы барысында RoboMech класындағы технологиялық және тасымалдау операцияларын автоматтандыруға арналған үш түрлі өндірістік манипуляторлық жүйе әзірленді және зерттелді. Екі ползунды механизм, екі жұмыс органы бар позициялаушы манипулятор және цилиндрлік координата жүйесінде жұмыс істейтін құрылғы үшін құрылымдық-параметрлік синтез жүргізілді. Кинематикалық және динамикалық талдау орындалып, тура және кері кинематика есептері шешілді және Лагранждың екінші ретті теңдеулері негізінде қозғалыс дифференциалдық теңдеулері алынды. Кинетостатикалық және беріктік талдауы жүргізіліп, кинематикалық жұптардағы реакция күштері мен ішкі кернеулер анықталды. 3D модельдер, конструкторлық құжаттама дайындалып, тәжірибелік үлгілер жасалды. Әзірленген манипуляторлар басқару жүйесінің қарапайымдылығымен және жоғары өнімділігімен ерекшеленетіні анықталды. Зерттеу нәтижелері тәжірибелік түрде расталып, Қазақстан Республикасының патенттерімен қорғалған.
Жарияланымдар тізімі
- Baigunchekov Z., Naurushev B., Zhumasheva Z., Mustafa A., Kairov R., Amanov B. Structurally parametric synthesis and position analysis of a RoboMech class parallel manipulator with two end-effectors // IAENG International Journal of Applied Mathematics. – 2020. – Vol. 50(2). – P. 1–11. – DOI: http://www.iaeng.org/IJAM/issues_v50/issue_2/IJAM_50_2_23.pdf
- Baigunchekov Z., Laribi M.A., Kaiyrov R., Zholdassov E. Inverse kinematics and workspace of a 3-PRRS type parallel manipulator // Mechanisms and Machine Science. – 2021. – Vol. 103. – P. 71–78.
- Baigunchekov Z., Laribi M.A., Kassinov A., Mustafa A. Kinematic synthesis and analysis of the RoboMech class parallel manipulator with two grippers // Robotics. – 2021. – Vol. 10(3). – Art. 99. – DOI: https://doi.org/10.3390/robotics10030099
- Baigunchekov Z., Carbone G., Mustafa A., Amanov B., Zholdassov E. Structural-parametric synthesis of the RoboMech class parallel mechanism with two sliders // Applied Sciences. – 2021. – Vol. 11(21). – Art. 9831. – DOI: https://doi.org/10.3390/app11219831
- Baigunchekov Z., Carbone G., Zhumasheva Z., Amanov B., Zholdassov E., Tolenov S., Tleukhanov A. Kinematics of the “Ai-Gerim” robot arm // Advances in Service and Industrial Robots. – Springer, 2022. – P. 11–18. – DOI: https://doi.org/10.1007/978-3-031-04870-8_2
- Байгунчеков Ж.Ж., Мустафа А.К., Карбоне Д., Лариби М.А. Двухползуный механизм: патент РК на полезную модель №7019.