AP14971031 — Research and implementation of a bimodal system for detecting unmanned aerial vehicles in real time
The goals of the project are to develop a reliable automated bimodal system for detecting unauthorized access of flight objects to highly protected infrastructures in real time, to compare the differences between a system using only camera images and a bimodal system combining LiDAR and camera data, to check how much the proposed bimodal system improves accuracy localization of flight objects.
Relevance of the project: The purpose of this research project is to develop a reliable automated bimodal system for detecting in real time unauthorized entry of suspicious aviation objects into highly protected infrastructures, comparing the difference between a system using only a camera image and a bimodal system combining to check the magnification LiDAR and camera data will be sent about how accurate the proposed bimodal aircraft object localization system is. By integrating the camera sensor and LiDAR, data fusion or I/O integration methods are tested individually and the most effective method is selected.
Scientific supervisor: PhD doctor, Seidaliyeva Ulzhalgas
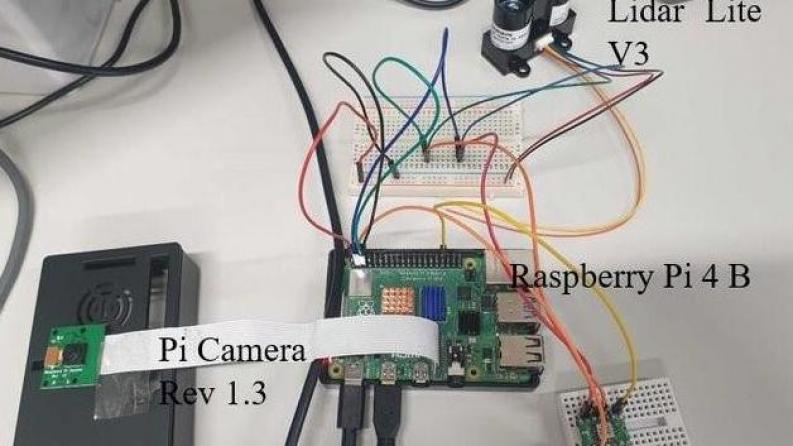
Results obtained: Within the project, methods for detecting and classifying unmanned aerial vehicles (drones) were comprehensively studied, including radar, radio frequency, acoustic, and computer vision approaches. Experiments were conducted to detect drones in static and dynamic backgrounds using LiDAR and camera sensor data. Neural networks (YOLO, MobileNetv2) were applied, including data preprocessing, labeling, and model optimization. Integration of multisensor systems enhanced drone detection accuracy, and a voting-based method was proposed. The research results were published in scientific journals, and the technical and economic feasibility of the system was assessed, with practical applications recommended. The project meets modern requirements and contributes to improving security measures.
List of publications with links to them
- Seidaliyeva, U.; Ilipbayeva, L.; Taissariyeva, K.; Smailov, N.; Matson, E.T. Advances and Challenges in Drone Detection and Classification Techniques: A State-of-the-Art Review. Sensors, 2024, 24, 125. (MDPI Sensors, percentile – 79%, quartile – Q1). https://doi.org/10.3390/s24010125
- Ilipbayeva, L.B.; Seidaliyeva, U.O.; Smailov, N.K.; Matson, E.T. Investigation of Unmanned Aerial Vehicle Detection Using a Modified YOLO Algorithm. Bulletin of Almaty University of Energy and Communications, Vol. 2, No. 65 (2024). https://doi.org/10.51775/2790-0886_2024_65_2_179
- Seidaliyeva, U.; Ilipbayeva, L.; Utebayeva, D.; Smailov, N.; Matson, T. LiDAR Technology for UAV Detection: From Fundamentals and Operational Principles to Advanced Detection and Classification Techniques. Preprints 2024, 2024101344. (MDPI Drones, percentile – 80%, quartile – Q1). https://doi.org/10.20944/preprints202410.1344.v1
- Barysova, A.; Seidaliyeva, U.O.; Smailov, N.K. Research of Deep 3D Object Detection Networks Using LiDAR Sensors. «RÉjBӘII Scientific Works», No. 4 (54), 2023.
- Seidaliyeva, U.O.; Smailov, N.K.; Abdykadyrov, A.; Turumbetov, M.B. Study on Drone Detection Using Multisensor Assignment Systems Based on Visual Data. «RÉjBӘII Scientific Works», No. 4 (54), 2023.
- Seidaliyeva, U.O.; Barysova, A.; Smailov, N.K.; Kashaganova, G. Research on Detection of Small Unmanned Aerial Vehicles Using a 3D LiDAR Sensor. The Bulletin of KazATC, No. 5 (128), 2023. https://doi.org/10.52167/1609-1817-2023-128-5-200-208