AP22685781 – Разработка системы управления манипулятором с применением компьютерного зрения для повышения гибкости и автоматизации процессов
Целью данной работы является изучение и анализ конструкций и принципов работы систем управления движением манипуляторов, использующих технологии компьютерного зрения и искусственный интеллект для логистических операций. В рамках работы также проводится обзор современных методов распознавания объектов и систем видеонаблюдения, способных повысить производительность манипуляторов.
Актуальность: В современных условиях развития промышленности и цифровой трансформации экономики особую значимость приобретает автоматизация производственных и логистических процессов. Робототехнические системы, в частности манипуляторы, широко используются для выполнения операций погрузки, сортировки и перемещения объектов. Однако их эффективность в значительной степени ограничена недостаточной адаптивностью и зависимостью от оператора. Большинство современных манипуляторов функционируют по заранее заданным алгоритмам и не обладают достаточным уровнем интеллектуальности для анализа изменяющейся окружающей среды в реальном времени. Одним из перспективных направлений повышения эффективности робототехнических систем является интеграция технологий компьютерного зрения и методов машинного обучения в контур управления манипулятора. Особую актуальность данное исследование приобретает в условиях, где производственные процессы часто характеризуются сложными эксплуатационными условиями, включая ограниченную видимость, работу с крупногабаритными и опасными грузами, а также необходимость адаптации к различным технологическим сценариям. Таким образом, разработка системы управления манипулятором с применением компьютерного зрения является актуальной научно-технической задачей, направленной на создание гибких, адаптивных и автономных робототехнических решений, способных обеспечить повышение производительности, снижение затрат и улучшение условий труда.
Научный руководитель: Доктор Ph.D., Рахметова Перизат Маратқызы
Ожидаемые и достигнутые результаты: Изучены современные методы распознавания объектов, которые могут повысить производительность манипулятора с использованием системы видеонаблюдения. Спроектирована механическая конструкция манипулятора. Опубликована статья в рецензируемых зарубежных и(или) отечественных изданиях, рекомендованных КОКНВО.
- Будут опубликованы не менее 2 (двух) статей в журналах из первых трех квартилей по импакт-фактору в базе данных Web of Science или имеющих процентиль по CiteScore в базе данных Scopus не менее 50.
- Будут опубликованы не менее 3 (трех) статей и(или) обзоров в рецензируемых зарубежных и(или) отечественных изданиях, рекомендованных КОКНВО.
- Будет получен патент в казахстанском патентном бюро.
Список публикаций с ссылками на них
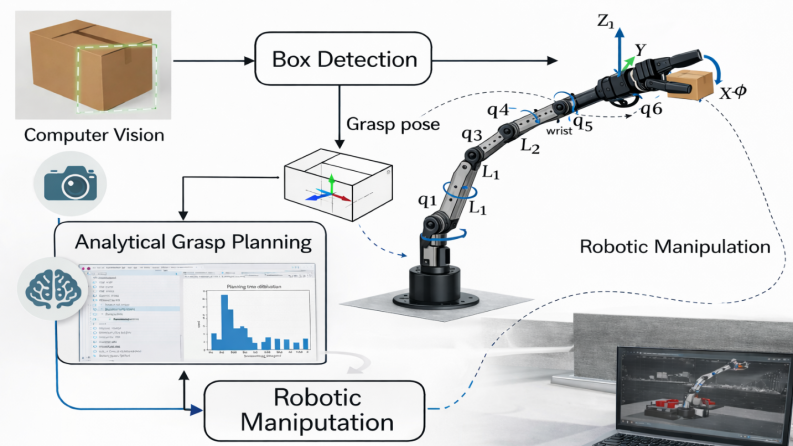
- П. М.Рахметова, Л. А. Курмангалиева, Н.С. Сембаев, М. М. Жамуратова, Ж.С. Бигалиева. Разработка конструкции манипулятора и алгоритмов компьютерного зрения для управления движением и распознавания // Научный журнал «Наука и техника Казахстана» - 2025 - №2 - С. 172 – 186. https://doi.org/10.48081/KKLG8361
- П.М. Рахметова, Д.Д. Даулетия, А.Н. Ешмухаметов. Разработка и исследование системы обнаружения и контроля внутритрубных дефектов. Вестник Университета Шакарима. Технические науки № 4(20) 2025: 117-123. https://doi.org/10.53360/2788-7995-2025-4(20)-14
- Койбагаров М.К., Исабеков Ж.Н., Курмангалиева Л.А., Байтурганова В.К., Рахметова П.М. Разработка системы предиктивного обслуживания на основе машинного обучения. Вестник Университета Шакарима. Серия технические науки. 2025;(2(18)):121-128. https://doi.org/10.53360/2788-7995-2025-2(18)-14
- Rakhmetova, P., Issabekov, Z., Zhamuratova, M., & Baiturganova, V. (2024). Моделирование систем компьютерного зрения с искусственным интеллектом. Вестник КазАТК, 134(5), 393–402. https://doi.org/10.52167/1609-1817-2024-134-5-393-402
- P. Rakhmetova, A. Bektilevov, L. Kurmangalieva, B. Bekbossynova and B. Shingissov, "Experimental Investigation of Computer Vision Architectures for Object Detection in Mobile Robotics," 2025 6th International Conference on Communications, Information, Electronic and Energy Systems (CIEES), Ruse, Bulgaria, 2025, pp. 1-4, doi: 10.1109/CIEES66347.2025.11300112. https://ieeexplore.ieee.org/document/11300112/references#references
- Патент на Полезную модель «Система управления манипулятором мобильного робота». Охранный документ №10165 от 23.10.2024г. МПК B25J9/00 (2006.01) H01L27/00 (2006.01). Бюллетень №6 от 07.02.2025г. https://gosreestr.kazpatent.kz/Utilitymodel/Details?docNumber=410087